EtherCAT i inne protokoły komunikacyjne


- Zakłady przemysłowe
- Logistyka
Artykuł dostępny również w wersji PDF.
Aby uzyskać dostęp do większej liczby lekcji, powróć na stronę startową kursu.
1. Obsługiwane protokoły komunikacyjne
Serwonapędy Unitronics pozwalają na komunikację ze sterownikami za pomocą różnych protokołów komunikacyjnych. Mamy do wyboru Modbus, CANopen oraz EtherCAT, jednak dla prawidłowego funkcjonowania naszego układu kontroli ruchu skupimy się na dwóch ostatnich.
2. EtherCAT
Ethernet for Control Automation Technology (EtherCAT) bazuje na protokole CANopen i Ethernecie, ale został specjalnie zoptymalizowany na potrzeby przemysłowe, dzięki czemu jest najszybszym z wymienionych protokołów (czas reakcji od 1 ms). Pozwala na podłączenie do 8 osi (serwosterowniki UMD-xxxx-E3) i dodatkowo 8 adapterów rozszerzeń wejść-wyjść Remote I/O, gdzie każdy adapter jest w stanie obsłużyć 16 modułów. Poza tym jest również możliwa obsługa urządzeń wspierających EtherCAT poza ofertą Unitronics, gdzie wystarczy zaimportować plik ESI urządzenia (max. 32 węzły). Do obsługi protokołu EtherCAT wymagany jest jedynie moduł rozszerzeń UAC-01EC2 (aktualnie tylko dla modelu USC-B5 i USC-B10). Podłączenie jest proste, bo wymaga jedynie użycia przewodu Ethernetowego RJ45 do podłączenia do serwonapędu. Nie są wymagane dodatkowe przejściówki jak to wygląda w komunikacji CANopen.
Konfiguracja podobnie jak w przypadku pozostałych protokołów została maksymalnie uproszczona. Do naszego sterownika należy dodać moduł UAC-01EC2 w Solution Explorer, Project → Hardware Configuration → Uni-I/O & Uni-COM możemy znaleźć w oknie Toolbox i przeciągamy do lewego boku sterownika PLC.

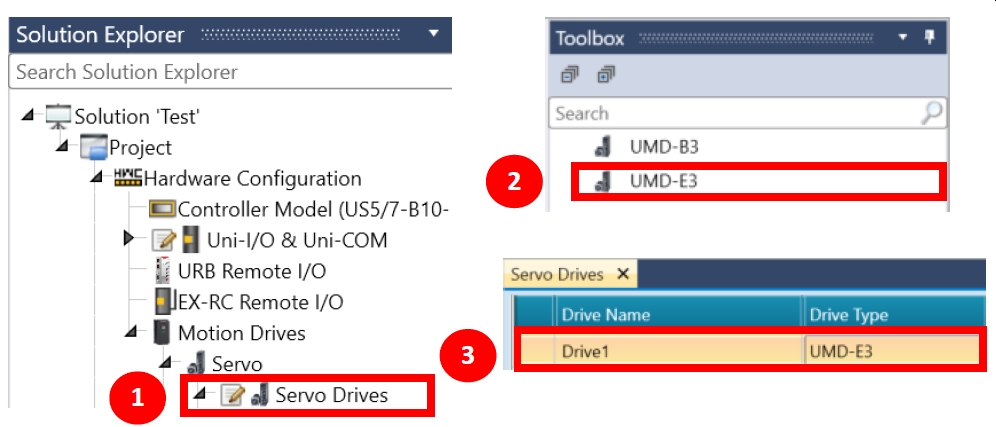
Podobnie jak w przypadku konfiguracji serwonapędów musimy dodać odpowiedni serwosterownik i używany serwosilnik. W oknie Solution Explorer przechodzimy do Project → Hardware Cofiguration → Motion Drives → Servo → Servo Drives. W oknie Toolbox wybieramy serwosterownik UMD-B3 i przeciągamy na środkowe okno Servo Drives.
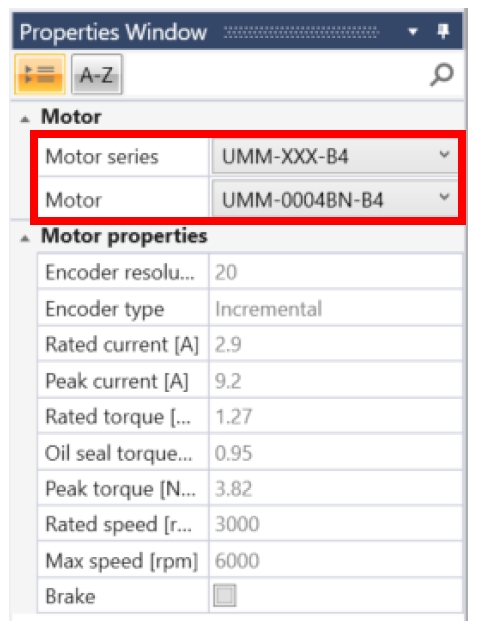
W oknie Properties Window (poniżej Toolbox) należy wybrać serię używanego serwosilnika w rubryce Motor series oraz model serwosilnika w rubryce Motor. Poniżej, w oknie Motor properties możemy sprawdzić parametry wybranego serwosilnika.
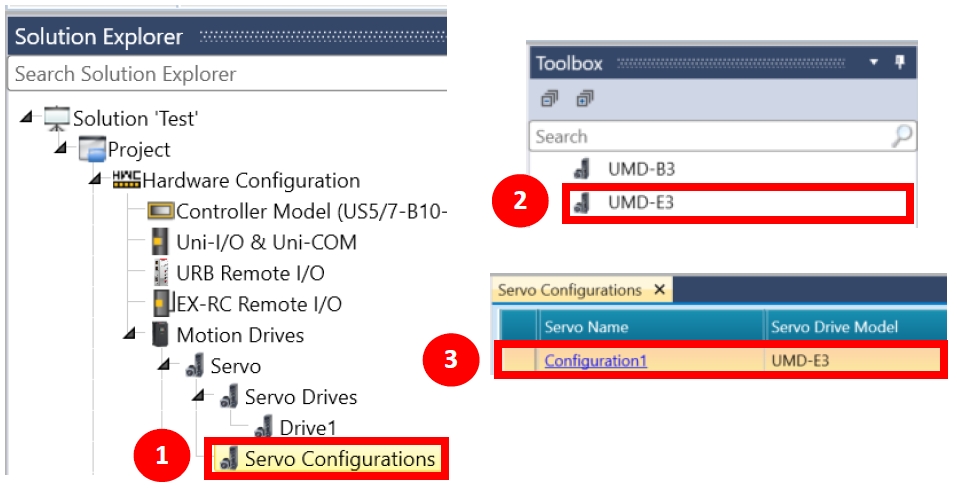
Kroki w celu dodania konfiguracji są podobne jak w przypadku wyboru serwosterownika. W oknie Solution Explorer przechodzimy do Project → Hardware Cofiguration → Motion Drives → Servo → Servo Configurations. W oknie Toolbox wybieramy serwosterownik UMD-E3 i przeciągamy na środkowe okno Servo Configurations.
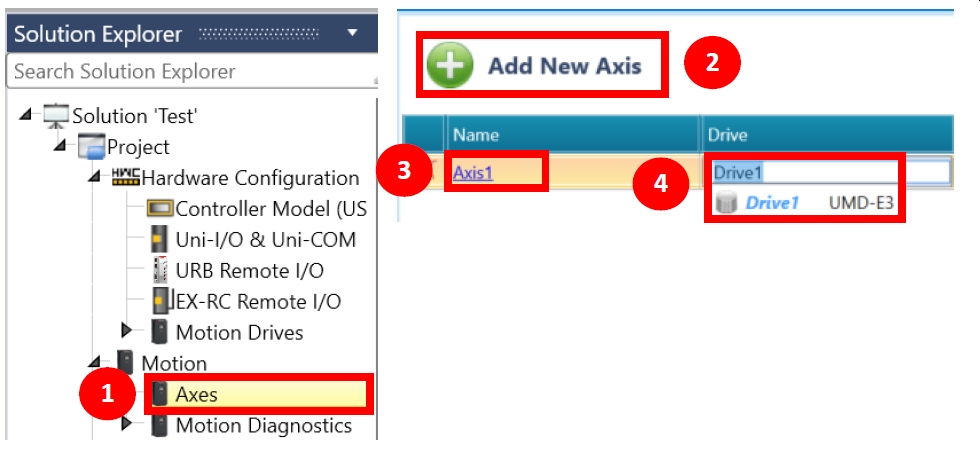
Pozostało dodać oś napędu. W oknie Solution Explorer przechodzimy do Project → Hardware Cofiguration → Motion → Axes. Klikamy przycisk „Add New Axis” w celu dodania osi serwonapędu. Po naciśnięciu pojawi się oś „Axis1” (nazwę możemy dowolnie zmienić). Ostatnim krokiem będzie wybór serwosterownika do utworzonej osi. W rubryce „Drive” wybieramy wcześniej skonfigurowany serwosterownik (w tym wypadku „Drive1”). Aby przejść do konfiguracji osi klikamy w nazwę osi w rubryce „Name” lub przechodzimy do Project → Hardware Cofiguration → Motion → Axes → Axis1.
Pozostałe kroki do przygotowania serwonapędu do pracy są takie same jak opisano w instrukcji „Konfiguracja serwonapędów Unitronics”. Oczywiście nic nie stoi na przeszkodzie, żeby projekt utworzony do serwonapędu z obsługą CANopen zmodyfikować do pracy na bazie EtherCAT. Wystarczy że zrobimy kroki wymienione powyżej.
3. CANopen
W przypadku CANopen mamy również możliwość podłączenia do 8 osi napędu. Sposób podłączenia został dokładnie wytłumaczony w instrukcji „Szybkie uruchomienie serwonapędów Unitronics”, a sposób konfiguracji w „Konfiguracja serwonapędów Unitronics”. CANopen nie jest protokołem tak szybkim jak EtherCAT (prędkość 1 Mb/s), ale cechuje go większa odporność na zakłócenia, które są często obecne w warunkach przemysłowych. Do pracy wymagany jest moduł UAC-CX-01CAN w przypadku UniStream Zintegrowanych, a w UniStream Modułowych i PLC, UAC-CB-01CAN.
4. ModBus
Komunikacja Modbus również jest możliwa, jednak pozwala tylko na konfigurowanie parametrów i monitorowanie operacji, a podłączenie jest przez RS-485 do portu CN3 lub CN4. Poniższa tabela pokazuje sposób podłączenia.
|
Numer terminalu |
Nazwa |
Opis |
|
1 |
- |
Zarezerwowany |
|
2 |
- |
|
|
3 |
485+ |
RS-485 terminal komunikacyjny |
|
4 |
ISO-GND |
Izolowana masa |
|
5 |
ISO-GND |
|
|
6 |
485- |
RS-485 terminal komunikacyjny |
|
7 |
CANH |
CAN terminal komunikacyjny |
|
8 |
CANL |
CAN terminal komunikacyjny |
Maksymalna długość przewodu wynosi 100 m, jednak dla transmisji powyżej 9600 b/s długość ta zmniejsza się do 15 m. Modbus pozwala na obsługę do 31 serwosterowników.
Ze względu na ograniczone możliwości protokołu Modbus jest on rzadko używany w serwonapędach. Wracając do wyboru odpowiedniego protokołu powinniśmy brać pod uwagę rodzaje urządzeń z jakimi chcemy się komunikować i obsługiwane przez nie standardy komunikacji. W rozbudowanych systemów kontroli ruchu polecamy EtherCAT, ponieważ pozwoli utrzymać stałą prędkość działania. Natomiast jeśli możliwy jest duży wpływ zakłóceń, a nasz system będzie sprowadzał się do małej ilości urządzeń lepszym rozwiązaniem będzie CANopen.
5. Do pobrania
Poniżej umieszczony został link programu dojazdu do pozycji tj. w instrukcji „Konfiguracja serwonapędów Unitronics”, tylko przygotowany pod komunikację przez EtherCAT.
>>>PRZYKŁADOWY PROGRAM ETHERCAT<<<
Aby uzyskać dostęp do większej liczby lekcji, powróć na stronę startową kursu.
Jeśli masz pytania, skontaktuj się z nami pod adresem e-mail: sterowniki@elmark.com.pl . Chętnie wysłuchamy również każdą konstruktywną krytykę na temat jakości tego kursu.
Produkty powiązane

Kable do serwonapędów Unitronics

Akcesoria do serwonapędów Unitronics

Serwosterowniki firmy Unitronics z komunikacją EtherCAT
Skontaktuj się ze specjalistą Elmark
Masz pytania? Potrzebujesz porady? Zadzwoń lub napisz do nas!

















